Project Overview
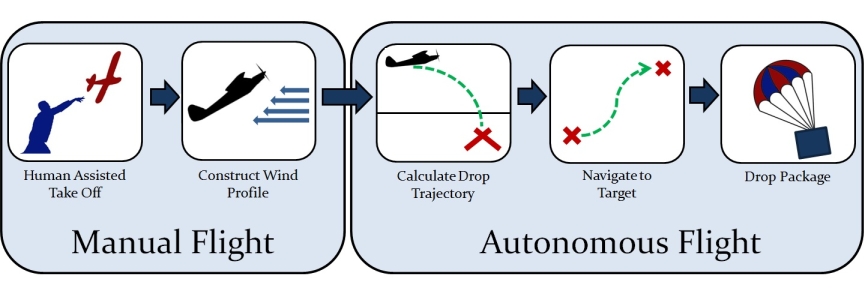
The final design of the project involves a model airplane that autonomously navigates and delivers a payload package to a target designated before takeoff. The system process begins with a manual launch of the aircraft, piloted during the ascent via radio controller (RC). During the plane's ascent to constant altitude, data gathered from the Pitot probe and GPS sensor are used to construct a three-dimensional wind profile. The average values of the wind components are input into the payload trajectory model, which then calculates the expected drift during the parachute's descent. From this information, the necessary offset is calculated, and the plane's target release coordinates are computed.
When the aircraft reaches its cruising altitude, the operator engages autonomous flight and the aircraft navigates to its drop coordinates. Once in the vicinity of the drop location, the payload release mechanism deploys, allowing the package and parachute to safely drift to the ground. A physical depiction of this procedure is shown below.
Although our plane is a reduced scale model of a real UAV, our plane dynamics model, controls model, and drop location model can be used on larger UAVs with only minor adjustments. The dynamics model allows users to see how the plane will react to an updated controls model, reducing the need for risky test flights. The controls model uses an appropriate combination of throttle and rudder control to maintain level flight and appropriate turns toward our drop location. Finally, the drop location model uses wind data collected during the ascent, parachute characteristics, and the physical release delay to determine when the payload release mechanism should be deployed. The design plan for each of these subsystems involved using theory to construct the initial model framework, and then validating and updating these models through the use of experimental flight data. The design approach and validation of each sub-system is detailed on their individual Project pages.
